【会员动态】戴盟携手银河通用,联合发布触觉操作评测基准RobOmni,构建物理AI关键基础设施
关注协会

2026年6月3日,戴盟机器人联合银河通用机器人,于ICRA正式发布行业首个面向物理交互能力的含触觉全模态评测基准RobOmni,以含触觉全模态仿真底座、围绕接触丰富操作的任务评测协议、Sim-to-Real完整验证链路,为物理智能构建关键基础设施,推动具身智能从“Demo驱动”迈向“标准驱动”。

当前,具身智能正从“以视觉感知为中心”迈向“以真实物理交互为核心”的物理智能阶段。视觉模态让机器人“看见”世界,却无法提供关键物理反馈;尤其在插接、装配、抓取柔性物体等接触丰富操作场景中,机器人需要通过触觉模态理解物理世界,学会在真实世界进行操作。行业已逐渐达成共识:触觉是机器人操作能力的关键输入,也是未来物理世界模型的基础模态之一。
今年4月,戴盟发布全球最大规模含触觉全模态物理世界具身数据集Daimon-Infinity,依托行业领先的触觉感知与融合技术、轻量化采集工具及大规模外发式采集网络,为具身智能提供源源不断的高质量物理交互数据,率先搭建物理智能的重要基础设施。然而,行业仍然缺乏围绕触觉感知与灵巧操作的标准化评测基准,不同模型与数据之间缺乏统一标准,触觉能力难以量化,模型泛化能力也难以被系统性验证。
RobOmni正填补了这一缺口,为物理交互能力提供标准化、可比较、可复现、可扩展的验证入口。戴盟机器人长期深耕触觉感知与物理交互,具备行业领先的视触觉感知技术、触觉融合算法能力以及大规模真实物理交互数据采集体系,为RobOmni提供了高保真触觉仿真底座及触觉丰富操作任务评测体系;银河通用机器人在多模态具身大模型、操作策略学习与机器人泛化能力方面具备深厚积累,为RobOmni构建面向具身模型的验证能力提供了重要支持。双方强强联手,共同打通触觉感知、具身大模型与操作能力验证体系。
高保真触觉仿真底座
为物理交互构建仿真验证环境
RobOmni基于NVIDIA Issac Sim的强大物理引擎,构建含触觉全模态仿真平台:完整复现真机设备的机械特性、动力学参数及传感器输出,支持高分辨率视触觉、RGB腕部相机、夹爪开合状态、动作指令、语言任务描述、外部相机等全模态观测,为物理智能提供高物理准确性的仿真验证环境。
平台内置目前模态最全、精度最高的戴盟核心自研触觉仿真器,以deformation map作为核心触觉表征,实现视触觉传感器在仿真与真实世界中的统一建模;完整模拟戴盟视触觉传感器的全模态感知能力,覆盖接触力、接触形变、滑移、材质、形貌、纹理、软硬等触觉信息。不同于传统仿真方法依赖标记点位移追踪,RobOmni直接利用物体与传感器表面接触信息,通过物理一致的形变求解模型高效解析指尖表面触觉形变分布,在保留良好物理特性的同时,提高仿真中的触觉响应的稳定性、可控性与可泛化性。
触觉仿真底座
围绕接触丰富任务
构建标准化评测体系
RobOmni聚焦以触觉为关键信息的接触丰富操作场景,提供标准化测试任务集,覆盖插销入孔、工件装配、螺钉紧固等数十个精细操作任务。

部分测试任务
评测基准以“任务成功率+任务完成度”为核心,同时覆盖操作效率、动作平滑性、接触稳定性、异常事件(滑移、卡滞、碰撞、重试)及泛化鲁棒性等多维指标,系统衡量模型在接触丰富操作中的真实能力。RobOmni独家支持触觉消融测评,可量化触觉信息对物理交互智能的实际贡献。
Robomni的标准化任务体系与统一评测基准,确保不同团队、不同时间、不同模型之间的测评结果具备直接可比性,加速行业标准收敛。
支持跨本体测评
具备大规模并行验证能力
RobOmni目前已完成对DM-TacClaw触觉夹爪的1∶1数字孪生,后续将拓展至五指灵巧手构型。平台内置多类主流本体仿真,包括Galbot、Unitree、DM-Sparky等人形机器人,及Realman、Franka、UR等机械臂,支持跨本体的统一评测。
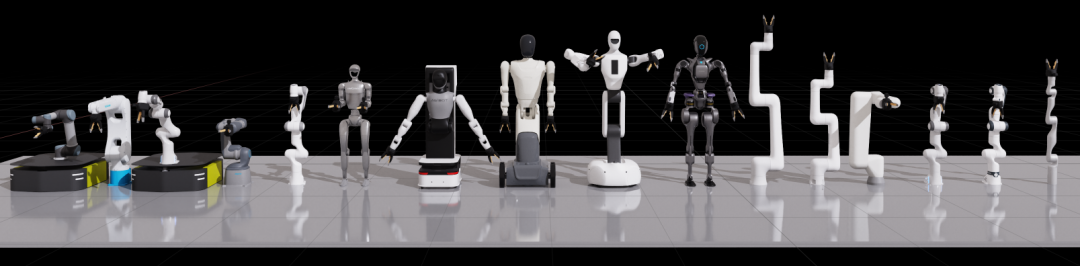
部分仿真本体展示
平台具备大规模并行批量验证能力,可同时运行数千个测评实例,大幅缩短评测时间、提升验证效率,为物理智能的快速迭代提供基础设施支持。
打通Sim-to-Real链路
为双训练路径提供统一入口
RobOmni提供仿真与真实世界完全一致的数据格式和接口,支持物理交互任务中的Sim-to-Real迁移。训练完成的模型实现零改动评测部署,仿真环境中开发的策略可直接迁移至真实硬件,实现Sim-to-Real无缝衔接。
平台同时支持“真实数据训练+仿真器训练”两种模式:用户既可基于如Daimon-Infinity等真实世界数据集训练模型,在仿真环境内完成标准化验证;也可直接基于仿真环境开展强化学习、策略训练与算法对比,实现从数据到能力验证的统一入口。

欢迎扫码登记,加入RobOmni
未来,RobOmni将进一步开放真机验证入口,贯通仿真评估与真实世界部署的完整验证通路。戴盟正逐步构建面向物理智能的关键基础设施,以“数据沉淀-能力验证-模型迭代”完整闭环,推动物理交互能力的标准收敛,系统性提升机器人操作与泛化能力的迭代与进化。
关于协会
深圳市机器人协会(SRA)由中国科学院深圳先进技术研究院于2009年9月发起成立,是国内最早成立的机器人行业协会。协会是由深圳市从事机器人行业的企业、研发机构及产业链上下游相关单位自愿组成的非营利性社会组织。深圳市机器人协会伴随着深圳机器人产业的发展和机器人企业的壮大而成长,会员包括工业机器人、服务机器人、医疗机器人、教育机器人、特种机器人及人工智能等领域的企业900余家,会员产值超2000亿元。是机器人领域会员个数和产值规模最大的地方性协会。
协会依托中科院深圳先进院的科研资源,下设深圳市人工智能专家委员会、青年专家委员会和医疗机器人专家委员会,先后发起成立深圳市人工智能学会、华南机器视觉产业联盟和深圳市物流机器人产业联盟。常年为政府、企业和第三方机构提供技术支持、产业对接等咨询服务。
来源|戴盟



所有文章未经授权禁止转载、摘编、复制或建立镜像,违规转载法律必究。
举报邮箱:1002263188@qq.com