江苏大学研究成果:融合复杂网络和双向Transformer的应急车辆轨迹预测
《汽车工程》2026年第4期发表了江苏大学汽车工程研究院及汽车与交通工程学院联合研究成果"融合复杂网络和双向Transformer的应急车辆轨迹预测"一文。围绕自动驾驶应急车辆在复杂交通环境下的轨迹预测精度提升这一核心需求,针对现有研究多通过交通信号优先和路径规划等宏观策略提升效率、却忽略微观交通动态的问题,系统构建了融合复杂网络与双向交叉注意力Transformer的轨迹预测框架CNBCAT。针对传统轨迹预测方法难以应对应急车辆高动态、低规则、任务刚性等特殊需求的问题,文章从微观动态视角出发,提出"多层复杂网络建模—双向交叉注意力交互—多数据集验证"的技术路线,为自动驾驶系统在紧急情况下的决策提供技术支持。
一、研究背景
应急车辆在执行任务时常面临高动态、低规则、任务刚性的交通环境,对轨迹预测精度提出了更高要求。现有研究主要集中于交通信号优先控制和优先路径规划等宏观策略,虽在减少延误方面显示出潜力,但在拥堵城市中,即使有优先信号,应急车辆仍可能受周围车辆干扰。同时,现有轨迹预测方法多针对标准化场景设计,缺乏对应急车辆特殊需求(如轨迹突变、优先权交互)的建模,难以适应动态交通流。基于此,文章从微观动态视角出发,提出一种融合多层复杂网络与双向交叉注意力Transformer的轨迹预测框架CNBCAT,旨在提升应急车辆在复杂交通条件下的轨迹预测精度。
二、研究内容
1. 3层复杂网络建模轨迹特征:针对复杂交通环境中多关联要素引发的系统冲突与耦合现象,提出一种动态多层复杂网络模型,从应急车辆视角构建交叉口网络(Layer A)、智能体交互网络(Layer B)和车辆轨迹网络(Layer C),通过多层次的特征提取有效捕捉轨迹数据的多维信息,为轨迹预测提供有力支持。
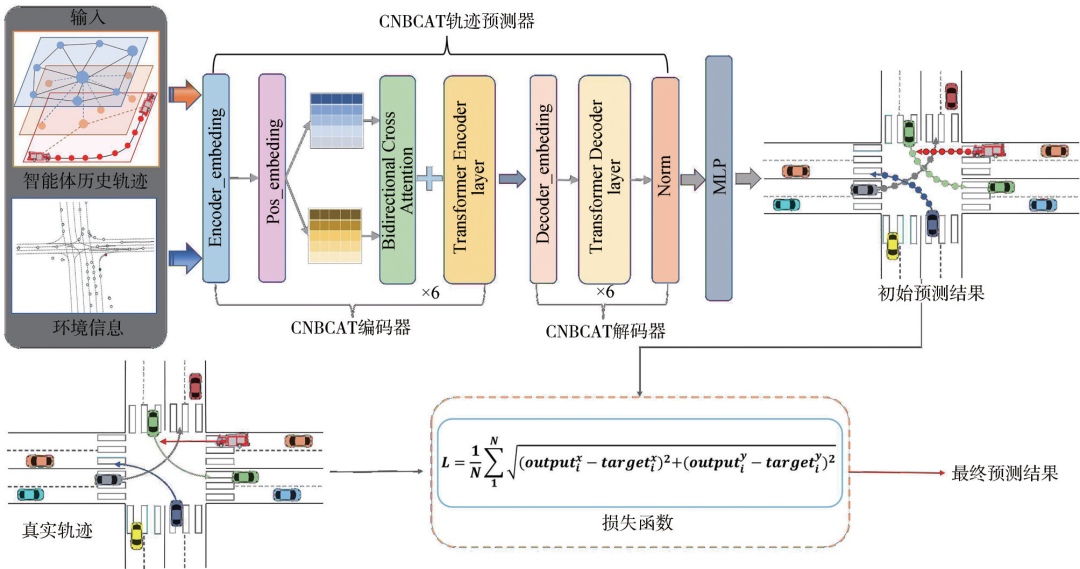
图1 基于CNBCAT模型应急车辆轨迹预测框架
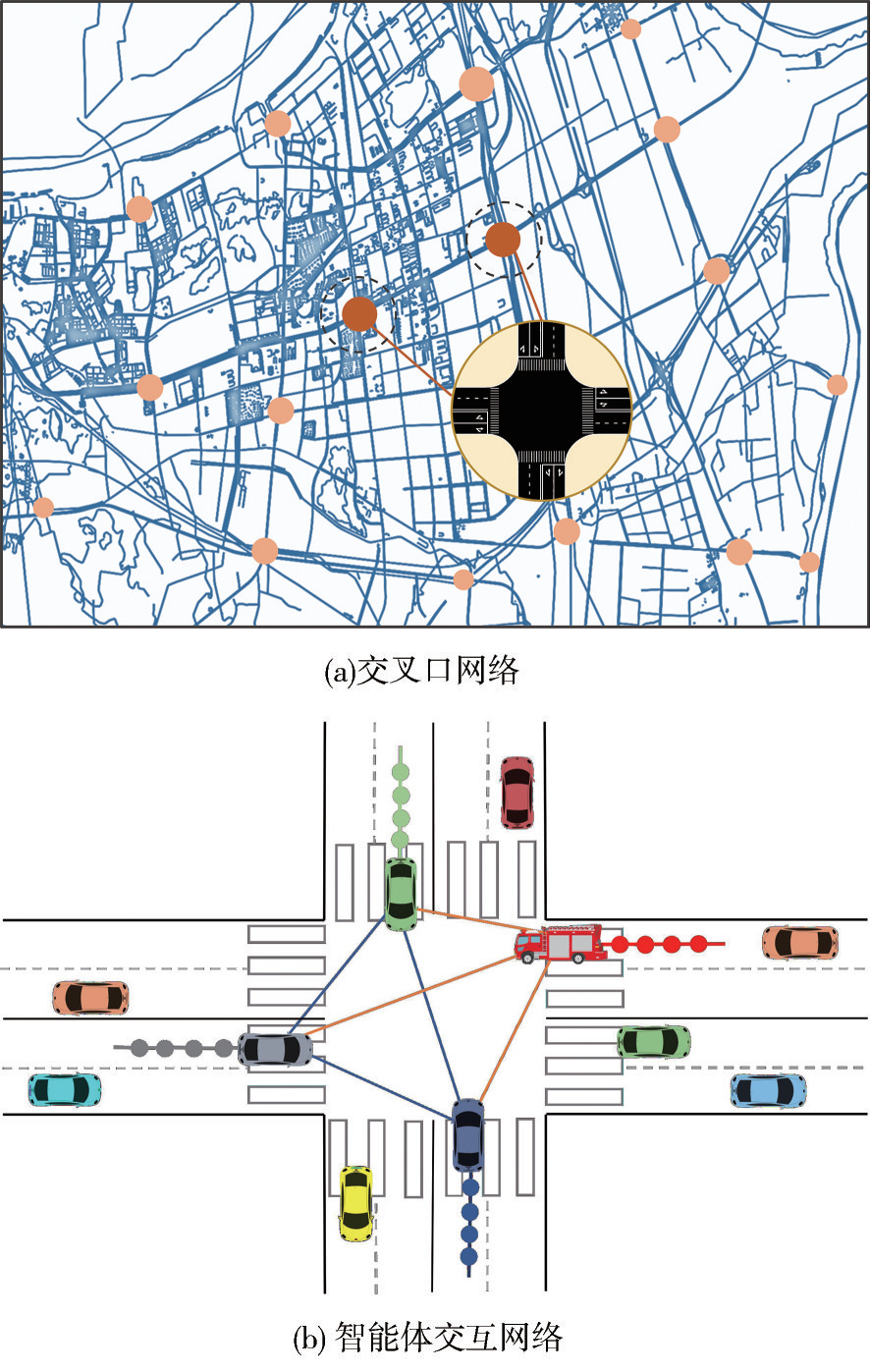
图2 3层复杂网络的拆解
2.应急车辆特殊行为建模:针对应急车辆高优先级调度、突变轨迹行为、红灯通行特性等特殊需求,采用特征嵌入方式融入预测框架,通过权重函数量化普通车辆对应急车辆的避让行为,在损失函数中引入应急车辆超速惩罚项,并采用分段微分方程描述轨迹突变行为,使得模型对应急车辆的轨迹行为具有更强的表征能力。
3. 双向交叉注意力Transformer交互建模:针对应急车辆与周围交通体之间时空交互复杂的问题,设计一种专门用于应急车辆轨迹预测的双向交叉注意力Transformer模块,通过双向建模应急车辆与周围智能体间的交互,动态调整关注点,提升智能体交互的捕捉能力,适用于高动态性和突发行为特征的特殊交通场景。
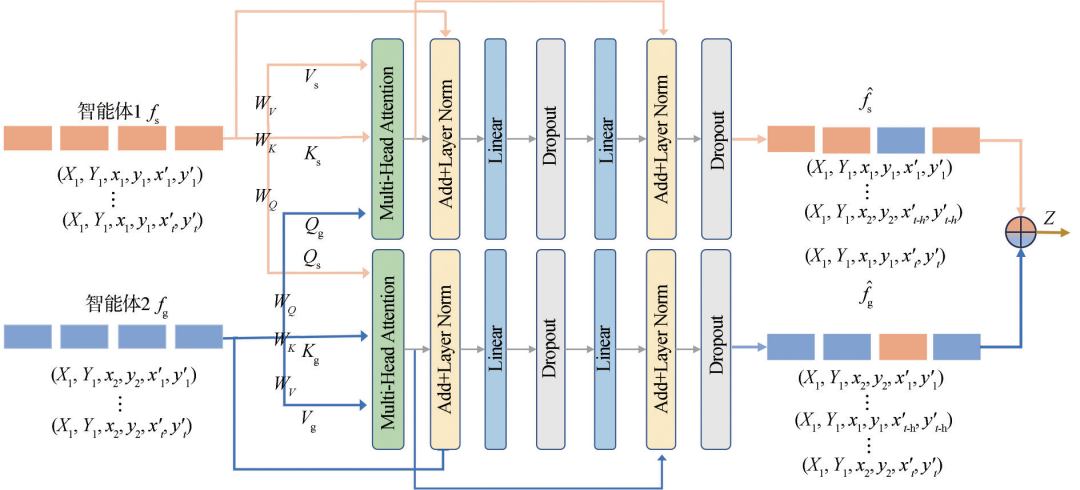
图3 双向交叉注意力Transformer模块
4. 多数据集实验验证与消融研究:针对模型泛化能力与各组件贡献度评估需求,在Argoverse1数据集和自制应急车辆轨迹数据集(含CARLA仿真消防车轨迹与实地采集应急物资运输小巴车轨迹)上进行实验验证,开展双向交叉注意力机制、多层复杂网络有效性的消融实验,并通过可视化分析验证模型预测准确性。

图4 雷达视频一体机数据采集场景

图5 应急物资运输小巴车轨迹数据采集场景
三、研究结果
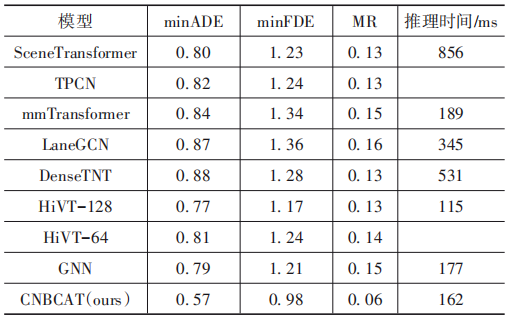
1. CNBCAT在公开数据集上显著优于SOTA方法:在Argoverse1验证集上的实验结果表明,CNBCAT框架在minADE、minFDE和MR指标上均显著优于基线模型,相较于GNN和HiVT等模型,minADE提升约25%,minFDE提升约16%,模型参数量为1.078M,推理时间为162ms,验证了所提模型在轨迹预测任务中的准确性和高效性。
表1 CNBCAT模型在Argoverse1验证集上与其他SOTA方法比较
2. 双向交叉注意力机制有效性得到验证:消融实验表明,CNBCAT在Argoverse1数据集上的收敛损失显著低于对比模型,ADE和FDE均显著优于其他模型,对比Transformer+CA,ADE提升约19.7%,FDE提升约16.6%;在自制应急车辆轨迹数据集上,CNBCAT测试损失最低且曲线最平稳,展现了其鲁棒性和预测优势。

图6 不同模型在自制应急车辆轨迹数据集上模型训练、测试损失
3. 3层复杂网络结构有效提升预测精度:在自制应急车辆轨迹数据集上的消融实验表明,相比GNN,引入多层复杂网络使ADE降低4.5%,FDE降低4.4%,MR降低14.3%;相较于单层网络(Layer C),完整的3层网络使ADE降低3.8%,FDE降低8.9%,充分验证了多层网络结构在提升预测精度方面的有效性。
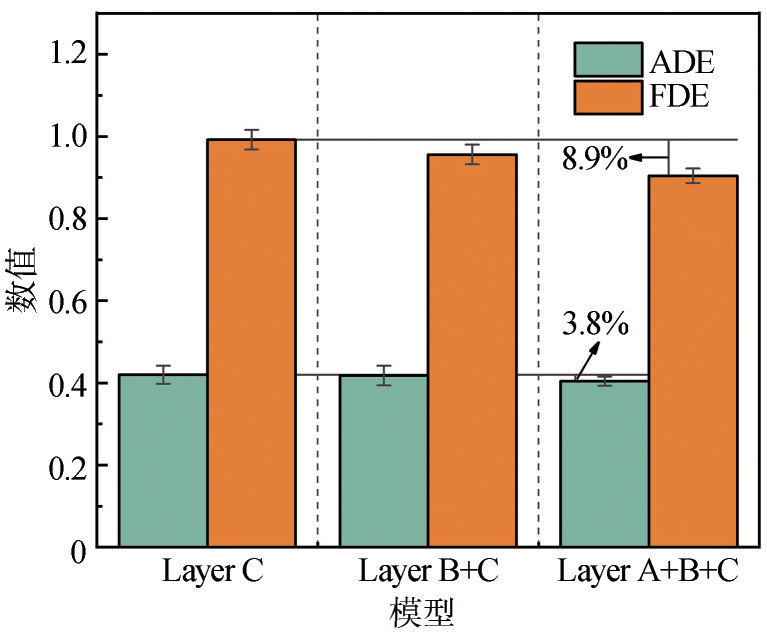
图7 CNBCAT模型中多层复杂网络有效性对比
4. 模型可视化验证预测准确性与泛化能力:基于Argoverse1数据集和自制应急车辆轨迹数据集的可视化分析表明,CNBCAT能准确预测目标智能体的未来轨迹,有效展示了模型在多数据集上的预测准确性和泛化能力,验证了其在提升应急车辆行驶效率与安全性方面的潜在应用价值。

图9 基于自制的应急车辆轨迹数据集上CNBCAT模型预测可视化
四、创新点与意义
文章从自动驾驶应急车辆微观动态视角出发,将多层复杂网络与双向交叉注意力Transformer相结合,突破了传统轨迹预测方法针对标准化场景设计、缺乏对应急车辆特殊需求适配性的局限,系统揭示了"多层复杂网络建模—双向交叉注意力交互—多数据集验证"的技术实现路径。通过结构化刻画应急车辆高优先级交互规则、非对称速度约束和轨迹突变特性等特殊行为模型,形成了可复用的应急车辆轨迹预测方法论框架,为理解高动态交通环境下智能体时空交互机理提供了整体认知基础。该方法不仅有效解决了应急车辆轨迹预测中微观交通动态被忽略的难题,也在多个具有挑战性的数据集上验证了其优异性能,为自动驾驶系统在紧急情况下的决策提供了具有参考价值的技术支撑。

所有文章未经授权禁止转载、摘编、复制或建立镜像,违规转载法律必究。
举报邮箱:1002263188@qq.com